


イオン伝導 アクチュエータ
世界で初めて開発された軽量ソフト高分子アクチュエータです。 イオン交換樹脂に電極として金を特殊化学めっきにより形成し、電極表面積を非常に大きくしたことにより変位性能を大きく向上させた、複合材料のアクチュエータ素子です。
2V程度の低電圧により素早く大きく動きます。
特徴
- 1. 動きは電気的にコントロールできます。
- 2. 筋肉と同じ位の柔らかさです。
- 3. 構造体が樹脂であるため軽い。
- 4. 駆動時に音を発生しません。
- 5. サイズを大きくすることにより発生力が大きくなります。
- 6. 0.1mm~10mmまでの駆動デバイスの作成が可能です。
- 7. 素子の組合せにより生き物の様な動きが可能です。
- 8. 低電力(0.05~0.2W)で動かすことが可能です。
- 9. 長期間(1年)の駆動が可能です。
- 10. 空気中・水中駆動が可能です。
- 11. 素子の変形に伴い起電力が発生しますので、自身がセンサとしても機能します。
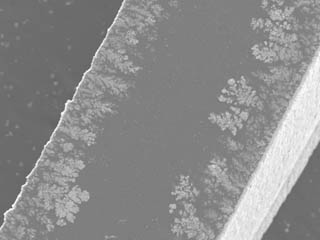
素子内フラクタル電極構造
今までの電動モータ、ソレノイドシリンダ等にはない多くの優れた特性を持っており、 新たなデバイスの設計が可能となります。
1.基本動作特性
素子はイオン交換樹脂でできており、生体の筋肉 程度の硬さです。柔らかいため発生力は素子のサイズと構造により大きく異なります。 また、応答周波数も自重・長さにより変わります。
| 短冊形 (mm) | ドーナツ形 (mm) | |||||
|---|---|---|---|---|---|---|
| 0.2t×1×20 | 0.2t×1×5 | 0.5t×3×10 | 1t×3×10 | 0.5t×10φ | 0.5t×30φ | |
| 応答周波数(Hz) | 50 | 500 | 30 | 20 | 30 | 30 |
| 変位量(mm) | 3回転 | 1回転 | 1回転 | 1/2回転 | 0.5 | 0.5 |
| 変位速度(mm/sec) | 50 | 100 | 30 | 20 | 0.5 | 1 |
| 発生力(g) | 0.02 | 1.0 | 6.0 | 40 | 20 | 70 |
2.動作原理
応答機構
電圧の印加により、高分子電解質内の陽イオンが陰極側へ移動し、表裏で膨潤に差が生じて変形する。
3.アクチュエータの基本動作
| 2方向タイプ |
アクチュエータ素子を厚くすると変位量・速度は厚さに比例して低下しますが、発生力は厚さの3乗に比例して大きくなります。 |
|
|---|---|---|
| 4方向タイプ |
四角柱(□1mm)の4側面全てに電極を配置し、対向する電極間にそれぞれ電圧を印加することでアクチュエータ先端を全方向自在に指向させることが出来ます。 |
|
| 高発生力タイプ |
素子の形状・動作方向を最適化することにより薄い素子でも高い発生力を発揮させることが出来ます。 |
4.生態模倣運動(水中、空気中)
| ヘビ |
4つの素子の極性を交互に反転させて繋いでいます。その結果まるでヘビのような動きをします。 |
|
|---|---|---|
| クラゲ |
素子を放射状に切り出し、電圧を上下面に印加しただけの簡単な構造でクラゲのような動きをします。グリッパーとしての応用も考えられます。 |
|
| 面アクチュエータ |
シート状素子の表面の絶縁溝や電圧印加のパターンを工夫することにより、複雑な動きが可能です。左の動画は3cm角のシート状素子の例です。 ロボット用人工皮膚、ダイヤフラムポンプ、人工心臓等への応用が考えられます。 |
|
| 人工目玉 |
形状の工夫によって眼球運動のような自由度の高い動きが可能となります。 |
5.ロボットハンド
各指を動かすことで物を掴むことが出来ます。素子は生体の筋肉程度にソフトであるため過剰な力は加わりません。

|
※上の動画では前後2方向のみに動く指ですが、全方向複雑に動く指の作製も可能です。
6.動作設計
イオン伝導アクチュエータは下記の駆動時の条件を変えることにより、いろいろな変位特性を発揮します。
- ●素子のサイズ
- 厚さを大きくすることにより発生力が大きくなります。(素子厚さ-発生力グラフ)
0.1mm~10mm角サイズの素子の作製が可能です。 - ●素子の形状
- 膜から切り出した形状、及び成型品の形状により動きが変わります。
発生力は素子の幾何学的形状から決まる剛性(素子長さ-発生力グラフ)と支持場所によって決まる ため、多点支持の場合は大きな力を発生します。 チューブ状素子では全方向の変位が可能となります。 - ●電気絶縁溝
- 絶縁溝の形成により、その電気抵抗値に応じた動きを発揮し、いろいろな動きが 作れます。
- ●素子同士の接続
- 極性を違えて接続することにより、変位方向が反対の動きが得られます。
- ●イオンの種類
- イオン種により変位速度、変位量が異なるため、用途に応じて選択できます。
- ●動作制御
- 低電力で変位速度、変位量、位置がコントロールされます。
定電圧/定電流制御の例
空気中・室温下で短冊状のアクチュエータ素子に定電圧および定電流のパルスを0.5sec間印加。
パルス時間を長くしていった場合の変位量 パルス印加時間 0.5sec 1.0sec 2.0sec 3.0sec 変位量(mm) 定電流2mA 0.7 1.4 2.8 4.2 定電圧2V 0.8 1.4 2.6 3.8 変位量は下図に示すようにイオン(電荷)の移動量に依存するため、上のグラフで直線関係となる
定電流(定電荷)制御の方が厳密な制御に向いている。定電圧/定電流短パルス(0.5sec)を印加した場合の投入電荷量と変位
測定条件
その他の制御例
空気中・室温下で短冊状のアクチュエータ素子に、PWM電圧のDUTY比を変化させて印加。
PWM制御下ではDUTYに対してイオン移動量がコントロールされ、変位制御が行える。
- ●印加電圧波形
- 1サイクル内における変化速度のコントロールができます。 より生物に近い動きが可能です。
- ●リード端子位置
- 端子位置からの距離に応じた電気抵抗により、動きはコントロールされます。